The A50S is the smallest VESC®* based controller on the market, with a minimum size of only 35x21mm.
It was designed specifically for use in Beatleweight and Featherweight combat robots and has been rigorously tested in the arena. However it can be used in almost any application using a motor (brushless or brushed). It features our standard 20pin latching connector which provides the full suite of IO that VESC®-project firmware supports.
We also sell a board mount version of the A50S for integrating with your own hardware
https://teamtriforceuk.com/a50s-v2-3c-module/
Some examples of how we have used them:
Featherweight Drive - Slice of LiFe (Blue)
12S A50S with sensored 5045 motors for drive
Weapon/drive on our Beatleweight - Just a wee Slice (Blue)
4S A50S with Repeat Max for drive
A50S with T-Motor MN4010 Hub motor bar for weapon
Included in the package
- A50S V2.3c
- XT30 connector
- MR30 connector and cable cover
- Pico-clasp 20pin connector shell + double ended precrimped wires (please select how many you require above)
- Capacitor - solder on the cable as close to the A50S as possible.
Quick tips on setup
- Please attach included capacitor as close to the unit as possible.
- ONLY USE 1 BEC, do not connect the 5v wire on all but one or the BEC can be damaged! Or connect a diode inline to prevent backfeeding.
- We recommend detecting motors using the FOC motor setup wizard. This will automatically find the correct settings for your motor.
Current Handling - Motor current
- 20A (motor) continuous with no additional cooling, no heatsink
- 40A (motor) continuous with heatsink
- 80A (motor) burst (4s with no heatsink)
Mechanical Features
- Dimensions: 35.5 x 21 x 13.8mm without connectors,
- Weight ~11g ~30g with heatsink
- 3D models avaliable here: https://drive.google.com/drive/folders/1Uu2ekqWRjQy-1kAd9qATjfwv0aw9FCOZ?usp=sharing
Electrical Features
- CANBus
- Phase filters
- Integrated 500mA 5V BEC
- Aux power input 6-52V
- EEPROM for persistent data
Electrical Connections
- Amass XT30 Battery input
- Amass MR30 Motor output
- MicroUSB for connection to VESC®*-Tool
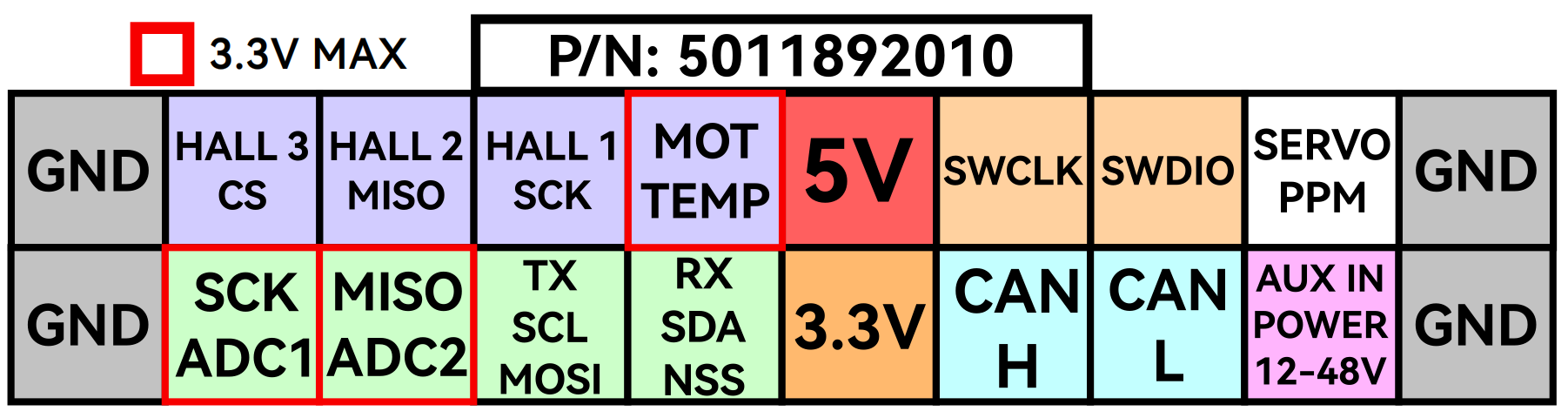
- 20 Pin Pico-Clasp connector for IO, see below image for Pinout
Hall, Motor temp, 5v, 3.3v, SWD, External ADCs, SPI, I2C, PPM, CANBus, Aux power
Motor Commutation Modes
- FOC - Sensorless, Hall Sensors, HFI
- BLDC - Sensorless, Hall Sensors
- DC - For driving brushed DC motors on outputs A and C.
Motor Control Modes
- Current - Controls current (torque) to motor irrespective of duty cycle
- Duty Cycle - Controls duty cycle sent to motor irrespective of current
- PID RPM control - Controls motor RPM using a PID loop
Control Interfaces
- PPM
- UART
- CANBus (supports UAVCANv0)
- ADC
Voltage Rating
- 8S Model: 6-35v, 2-8S LiPo (available on request)
- 12S Model: 6-52v, 2-12S LiPo
Safety Features
- Active current limiting - actively limits motor current to stay below programmed limit
- Software over current protection - stops motor running if the current exceeds programmed limit
- Slow temperature cutoff - ramps down motor current when approaching programmed max temperature
- Battery voltage cutoff - ramps down motor current when approaching programmed voltage cutoff
- Under / Over Voltage cutoff - stops motor running if the voltage goes outside the programmed range
Programming features - using VESC®* Tool
- Adjustable current limits, Battery and Motor current are independently controlled
- Adjustable voltage limits
- Adjustable RPM limits
- Adjustable Power limits
- Adjustable duty cycle limits
- Adjustable regenerative braking
- Adjustable throttle curves and ramping time
- Real time and Sampled Data monitoring and graphing
- Automatic motor detection and tuning
Motors tested
- 1806
- TP2040
- 4248
- 4250
- 5065
- 5045 Sensored
- MAD M9C12
- ThrustMe thruster
- XAG A16
The A50S runs the popular VESC®*-Project firmware by Benjamin Vedder.
* VESC is a registered TM, owned by Benjamin Vedder
2 Reviews Hide Reviews Show Reviews
-
ESC Performance
These ESC are great, I use the option speed control to drive the motor. I t was necessary to put a small capacitor in order to drive my motor. I would be helpful to have only one ESC to control 2 motors, looking for simplicity and for reducing weight.
-
Brushed/Brushless configuration and performance
Brushed: - One of the things I like the most about the A50S is its ability to drive DC motors above their voltage rating safely. In Brushed mode, with a duty cycle limit of 65% and a current limit of 1.8amps per motor, I am able to run Silver Sparks (Mabuchi 050) motors on 24 volts. Connecting them directly to a 24 volt source would destroy the motor extremely quickly. This opens up a LOT of options for beetles, that previously were difficult because you pretty much had to run 3s or 4s batteries to avoid destroying drive motors. The A50S is my favorite brushed drive solution for 3lbs, and even 12lbs robots for this reason. Brushless: - As far as brushless performance goes, the A50s has a lot of options available for tuning that no other product can match. By setting current controls and using FOC mode, you can control how much heat gets put into a motor and ensure nothing burns up. The high voltage capacity and current limiting enables some interesting design choices. I'm able to run a "3s max, 25 amp max" motor on 6s, with a 17 amp current limit in the A50s. This solution runs cooler, pushes more power, and with a gear ratio adjustment has the same top speed. The result is a huge spin-up improvement, with a system that runs stone cold. I've also tested a Prop drive 5050 on the A50S, with a 55 amp current limit. Predictably, the system overheated. However: the A50s gracefully protected itself by providing less and less current as it got too hot. I wanted to see how big of a motor I could get good performance out of. Its possible to get 10x the rated amperage through some of the bigger vescs for very short bursts, enabling a Fesc6.6 to power a 300amp stall motor. For the A50s I was seeing 55 amp short term bursts before the A50s started to really struggle with delivering more current, and the motor performance suffered. Overall: for brushless motors the A50S is a compelling choice for beetles that want to push a lot of volts instead of a lot of current. It enables designs using a 1200w motor at 6s, which is much more manageable than a 1200w motor at 3s.